

HOVER
An ultrasound device designed to connect trained sonographers to rural communities using tele-robotics

PROBLEM
Patients in rural areas must travel great distances to access essential healthcare services. General practitioners are available more locally, while accessing specialists remains a challenge.


BACKGROUND
is a specialist dependent imaging service. A non-invasive diagnostic tool used for prenatal care, imaging internal organs, musculoskeletal injuries and more.
ULTRASOUND
Provides healthcare services through electronic means such as phone or video call. It can be used to connect specialists in urban areas to rural practitioners, working together to deliver patient care.
E-HEALTH & TELEMEDICINE
OPPORTUNITY
By using the internet of things, we can create a new connection between rural and urban healthcare providers – using remote control robotics to perform ultrasound imaging via a virtual consult.
OPTIMIZE ERGONOMICS AND USER COMFORT
CREATE A COMPACT AND PORTABLE SOLUTION
PROVIDE A VERSATILE DEVICE FOR A WIDE VARIETY OF EXAM NEEDS
PROJECT GOALS

CURRENT MARKET

PORTABLE:

RC ROBOTICS:
OPPORTUNITY:
PORTABLE REMOTE CONTROLLED ROBOTIC UNIT
INSIGHTS FROM THE EXPERTS
Interviews with various relevant members of both rural communities and healthcare to provide a better understanding of the user and context.
Two rural patients, a former rural nurse, a rural sonographer, a remote sonographer, a telerobotic ultrasound researcher, and an E-Health researcher.
WHO I INTERVIEWED
Full range of motion with the probe is important
Being able to apply pressure with the probe is important
Anatomy varies and will impact how imaging is performed
Video-conferencing works well for remote controlled exams
KEY INSIGHTS:
SUMMARY OF 1ST CONCEPTS

1. Directional Interface

2. X-Y Gantry: Telerobotics

3. Supported Telerobotics
See more of what I learned from my first few concepts here! Pages 9-18
ROBOTICS
Delta system helps reduce size/weight
Probe would be attached to the bottom of the arms to accomodate a wide range of motion
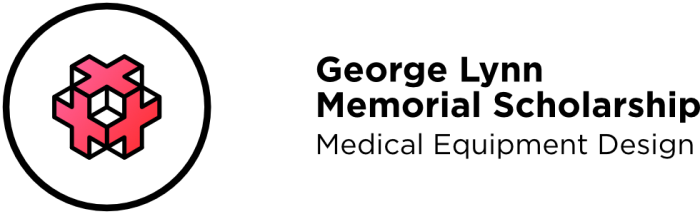
DELTA ROBOTIC SYSTEM
Proof of concept to understand how angles are created by the arms
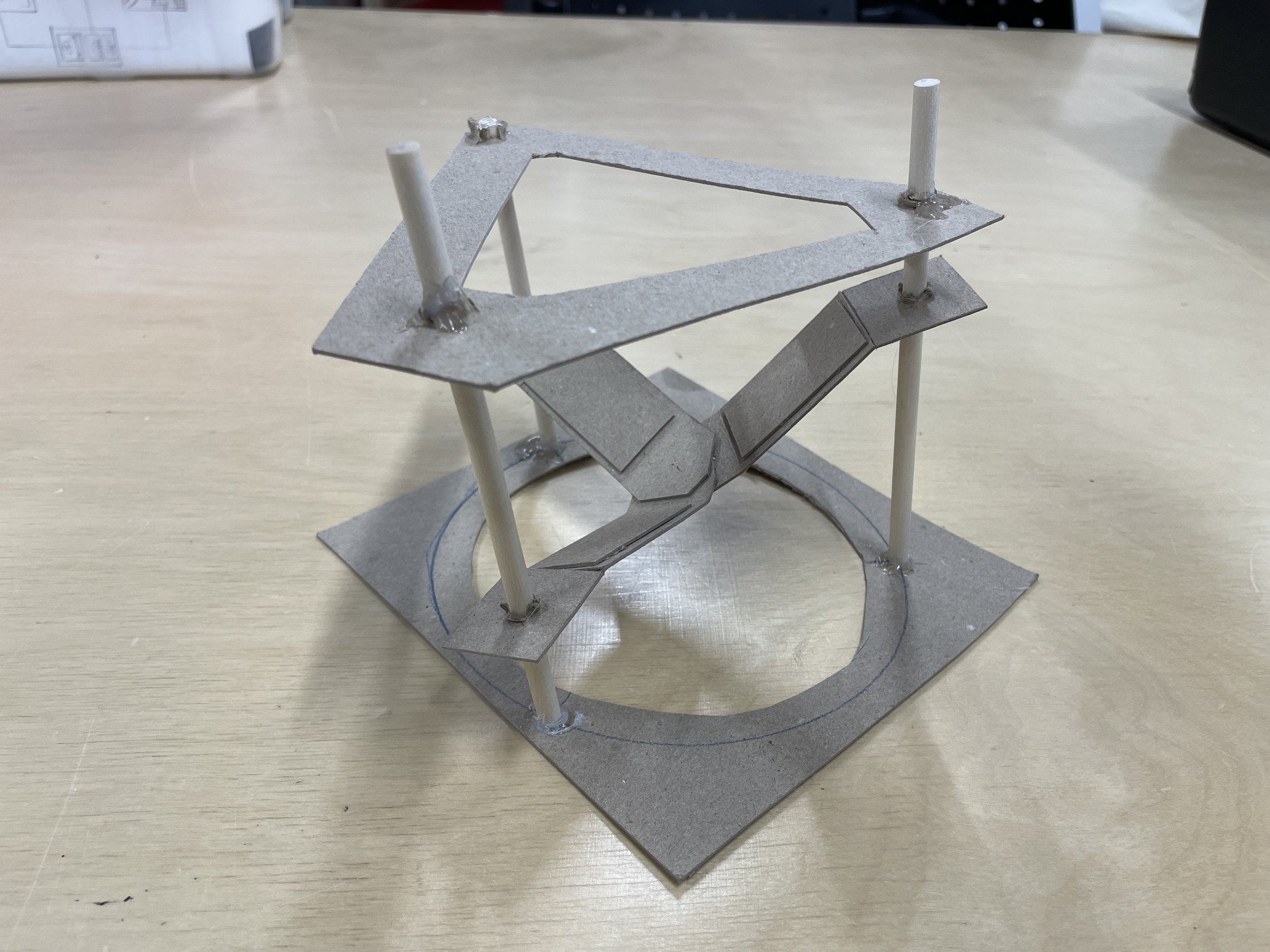
Rough CAD block model to gauge size and configuration

3D print with weights for realistic size and form to model around
Smaller robotics = smaller handheld device
DEFINITIVE DESIGN
Converting the ergonomic proof of concept into the final design

A modular block model with various handle placement options
WHAT?
The model allowed users to create their own prototypes and discover which postures were most comfortable in exam positions
WHY?

DISCOVERY
The animations demonstrate the exploration and how the handle configuration allowed the user to adjust the device placement with minimal effort from a neutral wrist posture–the handles and the base move so your wrists don’t have to.


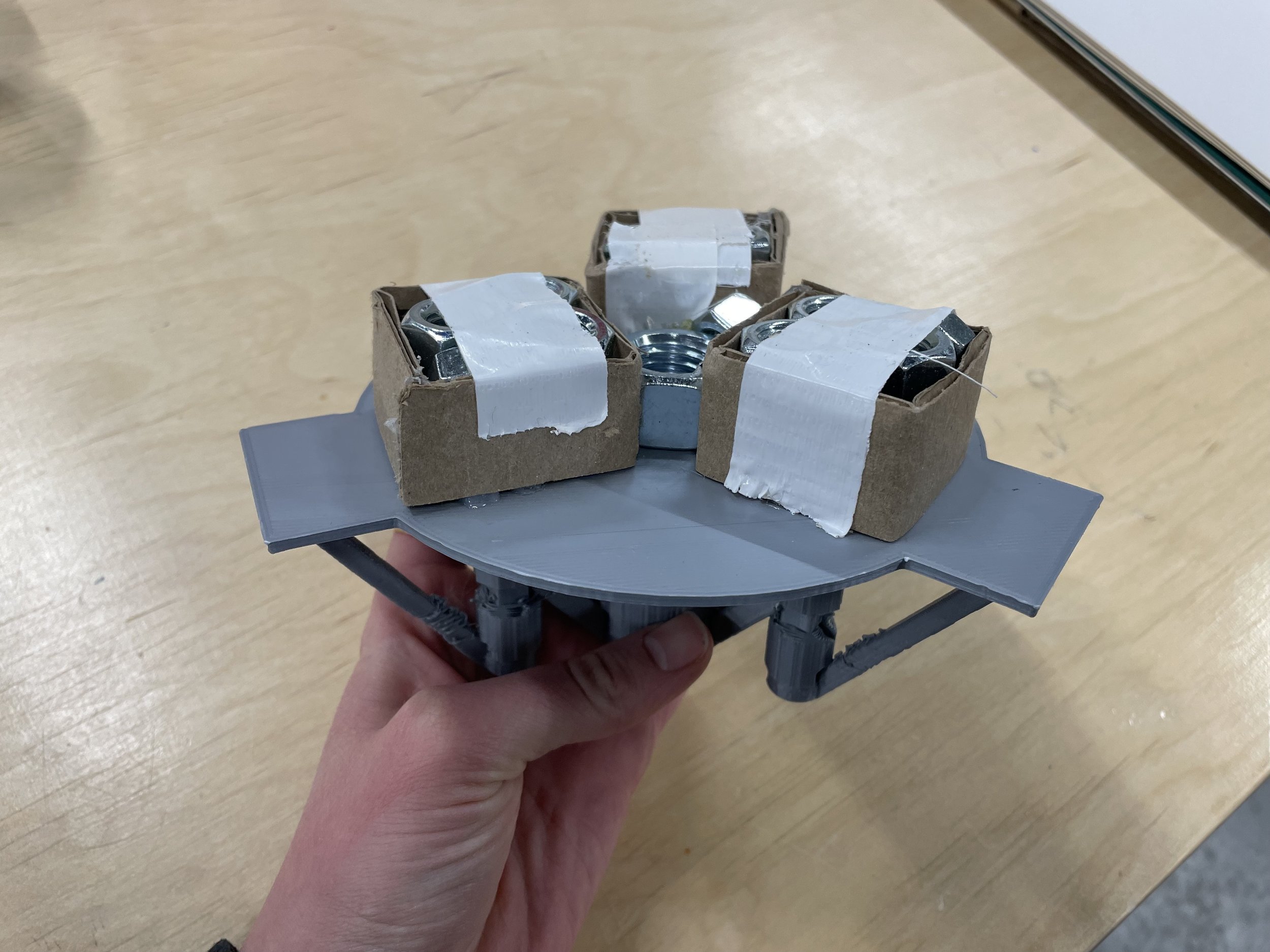
HOUSING IDEATION
Quick sketch overlays on robotic orthos
Cardboard frames for form exploration
Foam block models were helpful to compare for size and configuration


HANDLE IDEATION
Looking at different profiles, assessing them in conjunction with foam models to test comfort and form factor
TESTING
Different handle profiles tested in both upright and horizontal positions.
Tested by mounting handles to previous prototype and by tying a weight, similar to the device weight, to the bottom for anti-slip.


TRANSDUCER DESIGN
CLIP IN, INTERFACE WITH EXISTING ULTRASOUNDS
1ST ITERATION –



Simple clamp prototype tested on 3D prints of different standard transducer models
2ND ITERATION –
BUILT-IN, INTERCHANGEABLE PROBE
Looked at existing portable transducers to develop a concept for an integrated transducer driven by a system on chip.


FINAL PROBE DESIGN
FINAL DETAILS
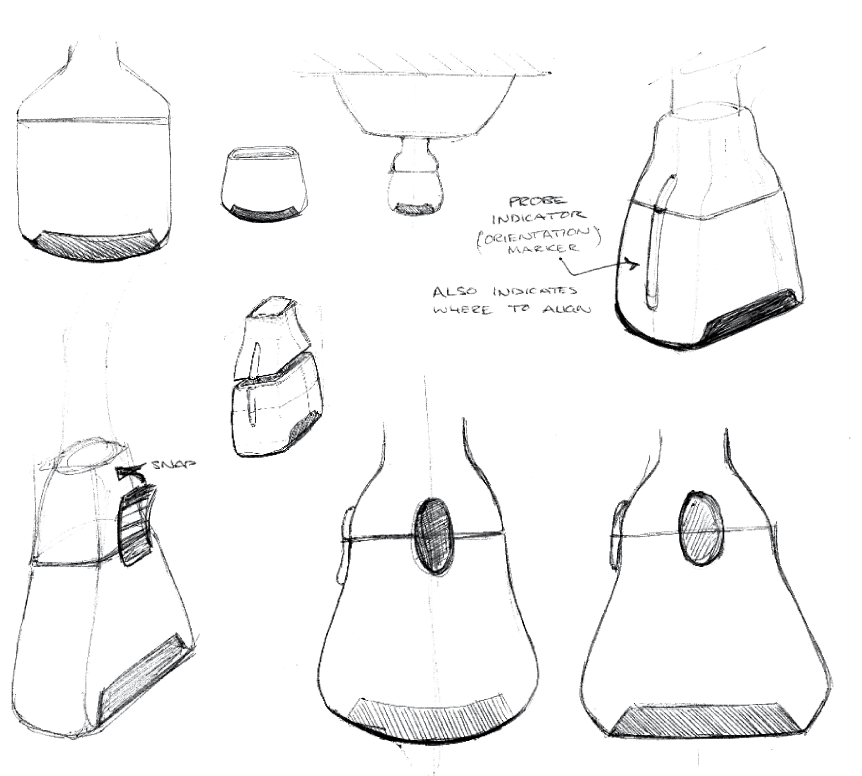
Model with holes at 1” increments and sliding weight
Discovered a 8-9” distance at the 45º angle was the optimal handle placement
WEIGHT-DIST. TESTING
Had a bit of fun in the shops making quick handle profiles
Found a profile that worked well for both the upright and horizontal handles while remaining balanced.
HANDLE REFINEMENT




FORM REFINEMENT
With the internals fleshed out I compared a few simple forms that could be the housing. Ensuring the form would cover the robotics and provide room for the handles to maneuver properly.

CAD PROTOTYPE & MOOD BOARD
Quick CAD mock up to play with CMF and analyze the spacing and distance of the transducer.







ERGONOMIC FEATURE
Constant neutral wrist posture, reduces strain in long exams
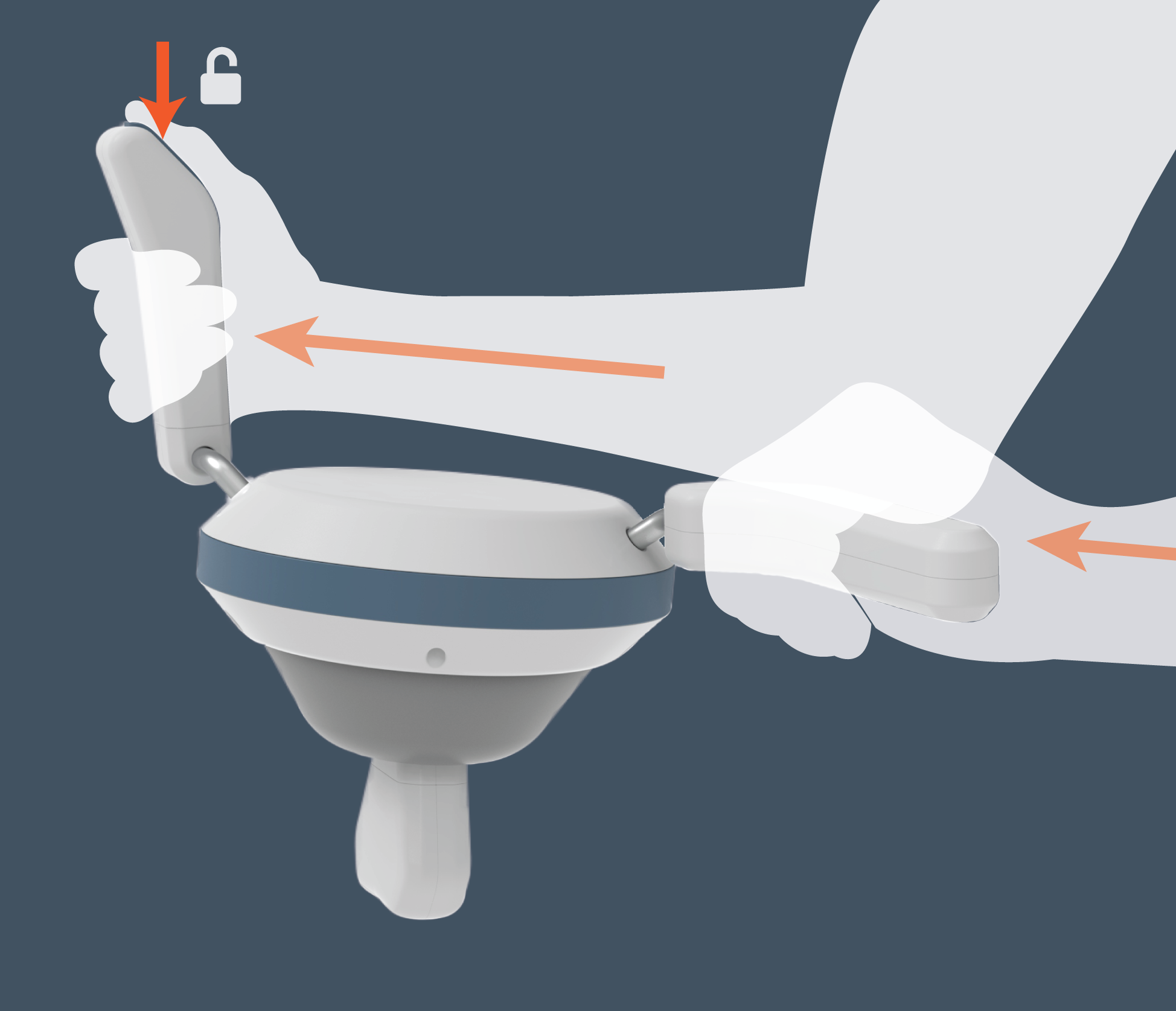

With handles released, the ultrasound base is able to rotate into a side exam position while wrists remain neutral.
The ultrasound is in a top exam position, the handle button releases lock so user can move them freely
USE CYCLE

Remote sonographer directs patient site assistant verbally to macro placement.

The sonographer controls the micro movements of the probe remotely with a mock probe.

Patient site assistant adjusts, using the hinging handles to maintain neutral wrist position.

Sonographer and patient complete their consultation virtually.
WHAT I LEARNED
The value of play in prototyping, letting the testers create solutions beyond what I had created or hypothesized.
A lesson in knowing when to seek expertise, I got a bit stuck on the robotics side of the design and later realized I should have found an expert and had time to focus more on what was important to me as the designer.
Research, this was great practice in interviewing and developing scripts and questions to get the most out of my time with the folks who know best. Coming to both ultrasound and the rural context from a complete outsider perspective, the research was incredibly important to be able to create a relevant solution.
